问题定义
04 / 16
系统架构
多传感器融合
的四层架构
的四层架构
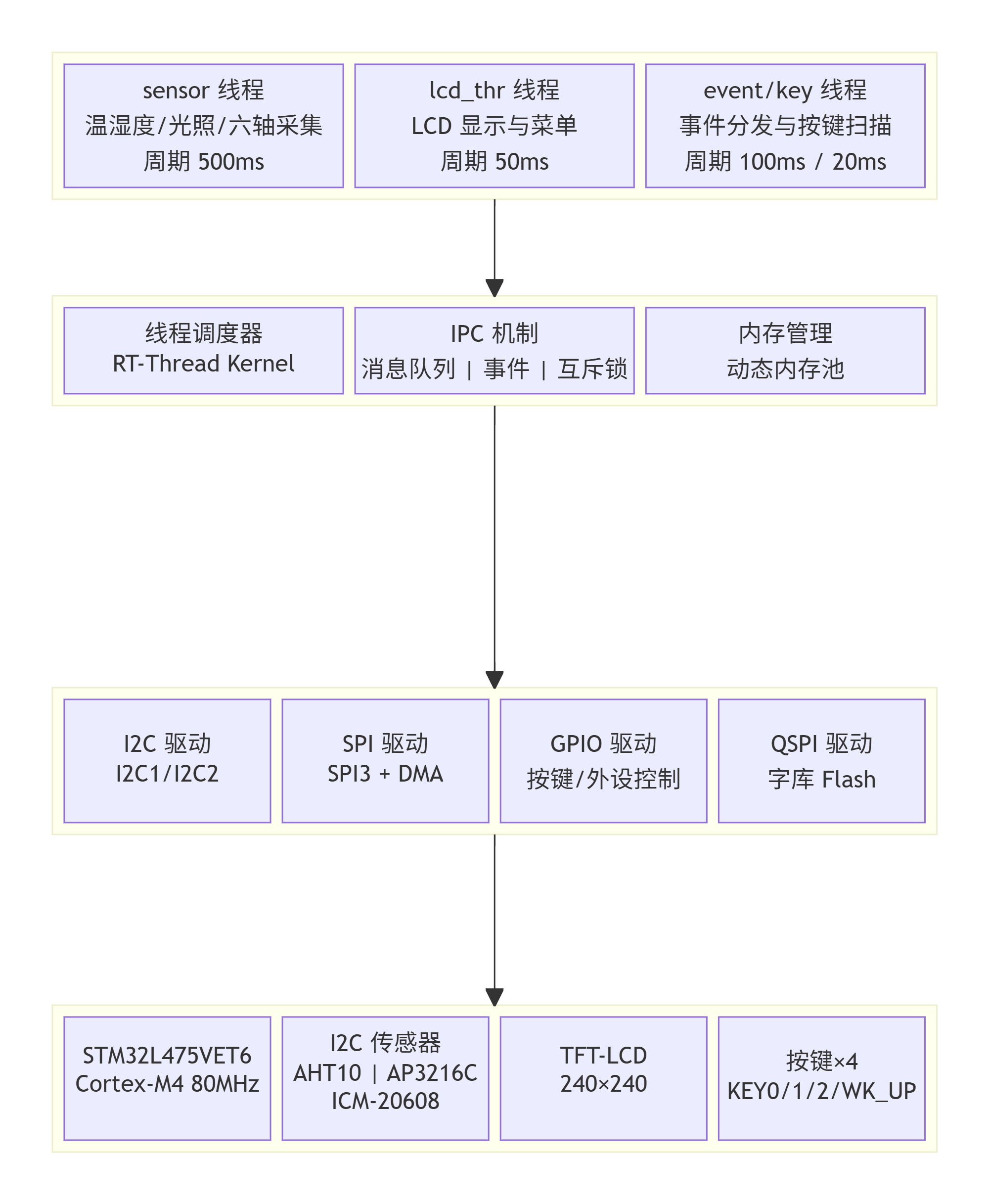
硬件层 → 驱动层 → 内核层 → 应用层
自底向上的四层抽象中,RT-Thread 内核提供线程调度、IPC 通信、时钟管理等基础服务,应用层四个线程按优先级并发,实现实时环境感知。
系统总体架构 · 自底向上四层
系统架构概览
— · —
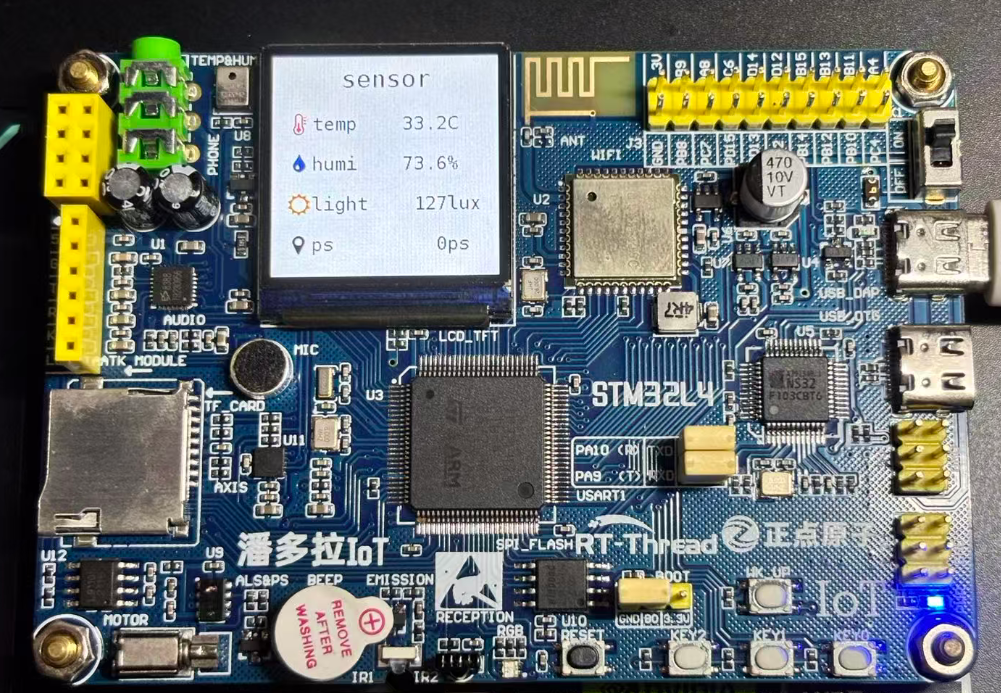
硬件平台
05 / 16
硬件平台一览
3+1
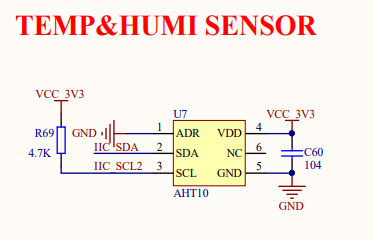
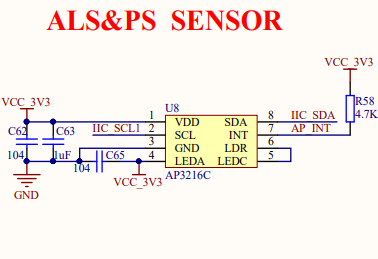
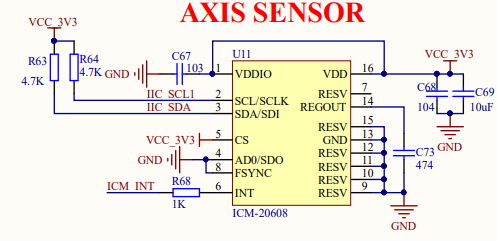
三种传感器
+ 一块 LCD 屏
+ 一块 LCD 屏
4
物理按键
KEY0–KEY3
KEY0–KEY3
硬件平台
— · —
IPC 通信
08 / 16
线程间通信
IPC 通信机制
消息队列 · 事件标志 · 互斥量 · 邮箱
消息队列
传感器线程将 11 维数据打包为结构化消息,发送到 lcd_thr 的消息队列,实现异步解耦
MQ
事件标志
数据就绪 / 按键事件两个标志位,lcd_thr 以 250ms 周期轮询,事件驱动 UI 刷新
EF
互斥量
保护传感器数据共享结构体,关中断执行原子读写,防止数据撕裂
MUT
邮箱
key_thr 检测按键后通过邮箱投递按键值到 event_thr,实现异步事件分发
MB

IPC 通信机制
— · —
启动流程
10 / 16
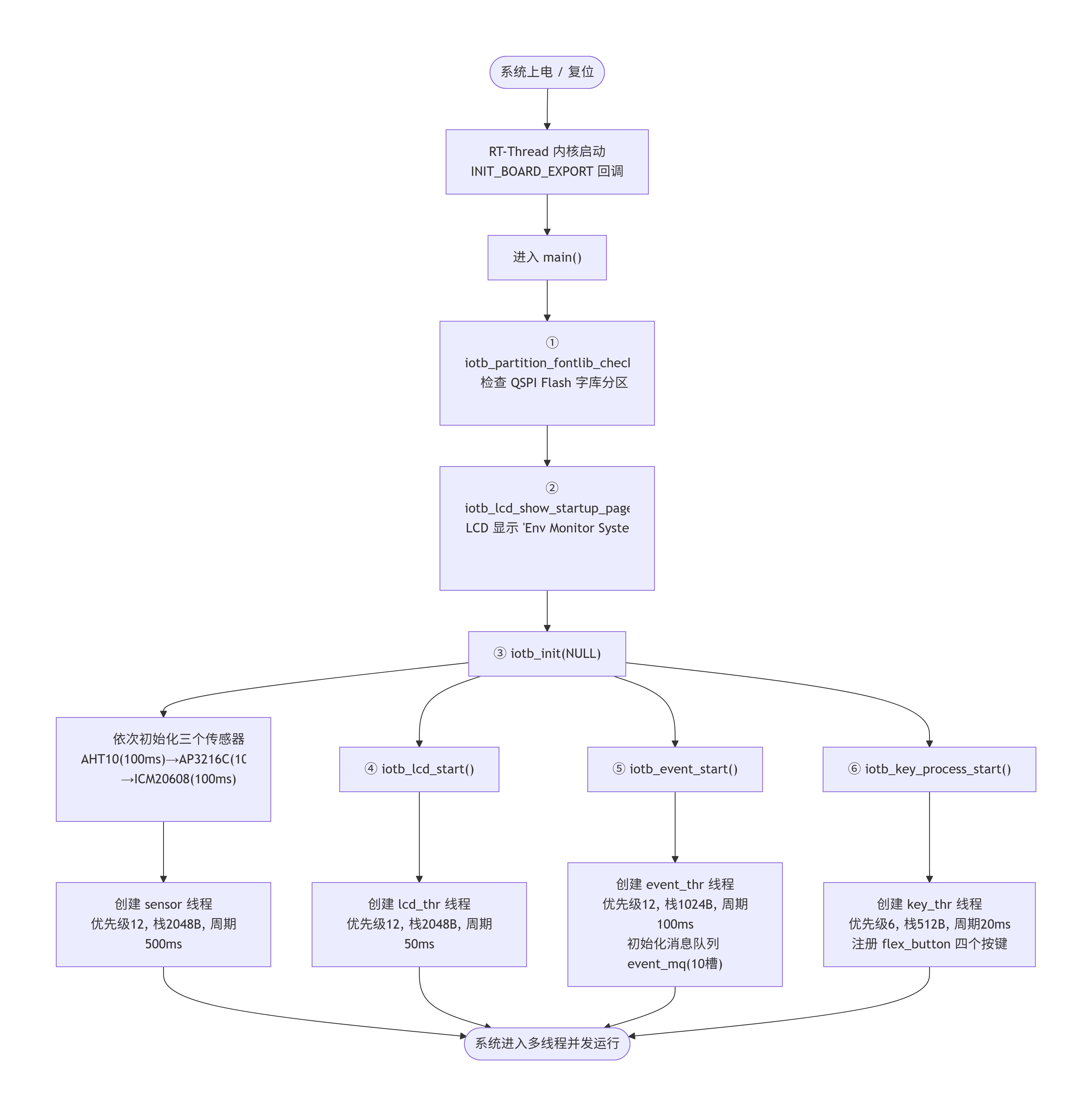
初始化序列
系统启动流程
01
板级初始化
时钟配置 · GPIO · I²C · SPI · 串口
02
外设驱动注册
AHT10 · AP3216C · ICM20608 · LCD
03
线程创建
4 线程 + IPC 对象初始化
RT-Thread 启动后依次执行硬件初始化、外设驱动装载、IPC 对象创建和四个线程动态创建,系统进入并发运行状态。
main.c · 启动序列
启动流程
— · —
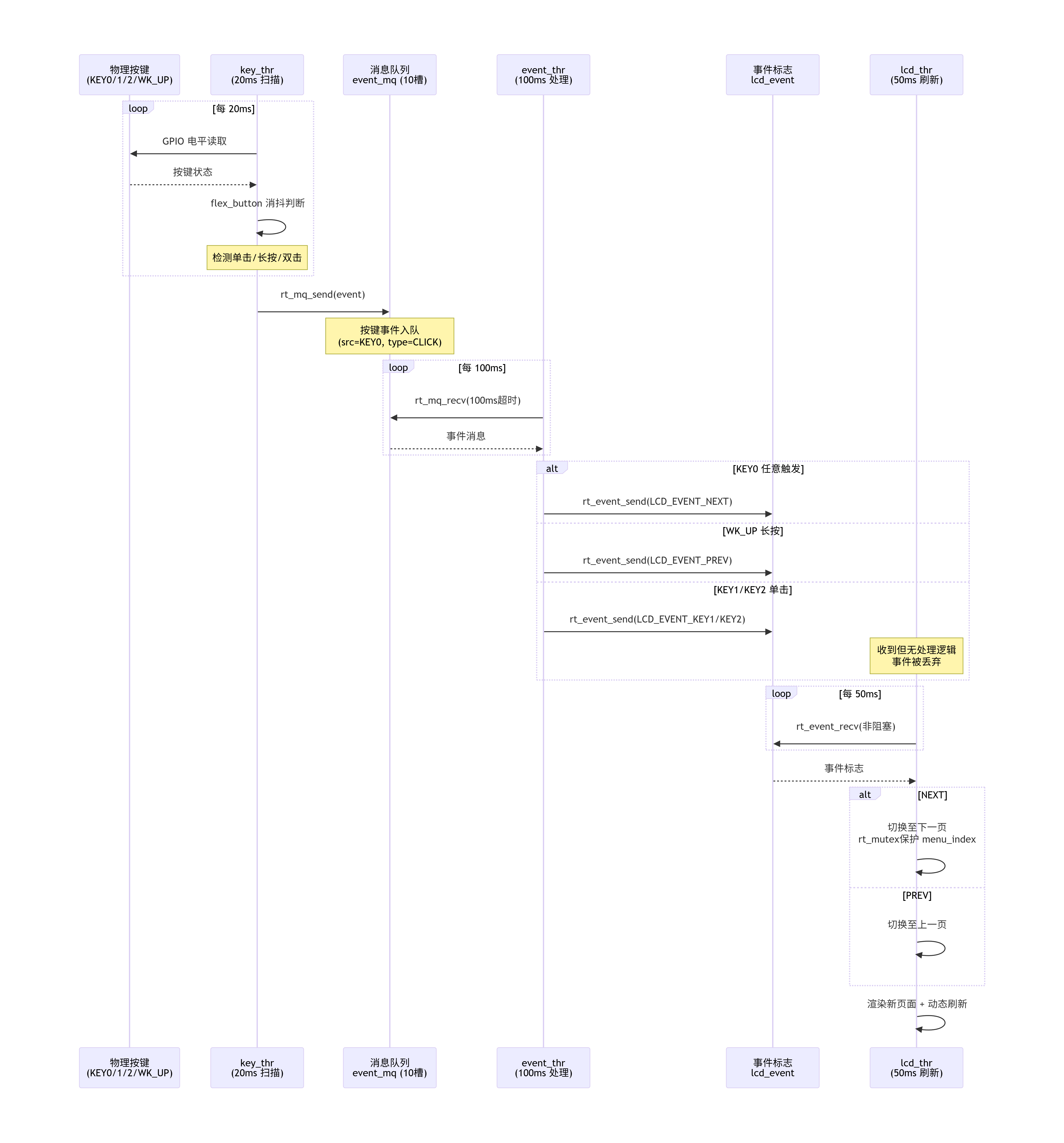
事件分发
13 / 16
事件驱动架构
事件分发链路
①
按键中断
GPIO EXTI
触发回调
触发回调
②
key_thr
20ms 消抖
→ 邮箱投递
→ 邮箱投递
③
event_thr
解析按键
→ 设置事件标志
→ 设置事件标志
④
lcd_thr
响应标志
→ 页面切换
→ 页面切换
按键事件从硬件中断到 UI 响应的完整传递链:GPIO → key_thr (消抖) → 邮箱 → event_thr → 事件标志 → lcd_thr → LCD 页面刷新。
事件传递链 · 四环节
事件分发
— · —
致谢
16 / 16
致谢
感谢 RT-Thread 开源社区提供的优秀 RTOS 内核
感谢正点原子探索者 STM32F4 开发板的硬件平台支持
感谢正点原子探索者 STM32F4 开发板的硬件平台支持
致谢
— · —